Creative Machines
Three methods for creative collaboration with machines — the seed of my creative technology practice

For my BFA thesis at the Rhode Island School of Design, I built a set of four tools for making drawings. Each one harnessed the quirks of a machine — its motor backlash, its sensor noise, its rolling momentum — and turned those quirks into a creative collaborator. The goal was to get people out of their own heads: to set out drawing a bird on a branch, end up with something else entirely, and treat that drift as the point rather than a mistake.
Looking back, this is where the thread that runs through all of my creative-technology work started. I'm still building tools that put people in collaboration with machines, still asking them to embrace what they can't fully control.
Interactive Drawing Arm (IDA)
IDA is an articulated ink-brush arm mounted inside an empty picture frame. Three joints and a pan motor — four motors total — each wired to a repurposed PlayStation 2 joystick through an Arduino microcontroller. A bottle of ink hangs from the frame; the brush dips, drags, and lifts according to whatever the joysticks say.
Because each joystick controls exactly one motor, the arm is hard to drive alone and much more interesting with friends. Up to four people can crowd around the frame, each in charge of one degree of freedom, trying to coordinate a drawing in real time. The intent was to make collaboration unavoidable, and to make the inevitable miscommunications part of the result.
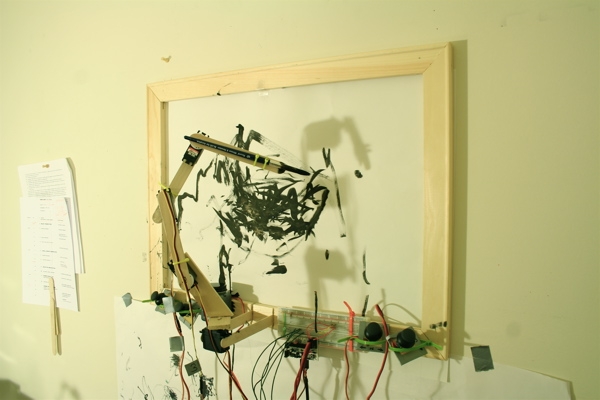
The drawings that come out of IDA all share a family resemblance: jittery, overlapping marks that nobody could draw on purpose. They're a record of four people trying to agree.




InfraRed to Audio Hands (IRAH)
IRAH is the more digital sibling of IDA. The user wears a pair of gloves fitted with infrared distance sensors and stands in front of a rear-projected canvas. As they move their hands across the canvas — left and right, up and down, closer and farther — the projected brush follows in x, y, and z, with depth controlling brush size.
At the same time, the system maps hand position to pitch, so the user hears the drawing as they make it through a pair of headphones. The setup is designed to be playable with your eyes closed: you can stop looking at the canvas and try to draw by sound alone, listening for the shape you're making.

Barrier Avoiding Robotic Brush (BARB)
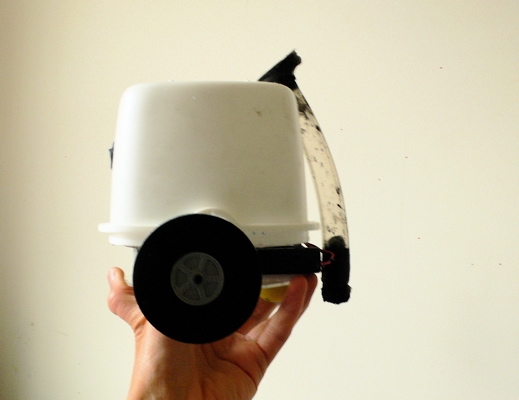
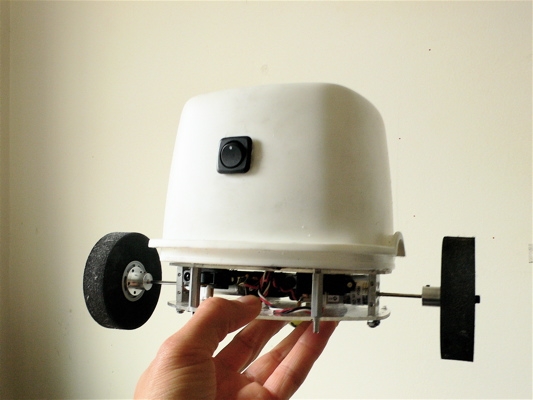
BARB is a small wheeled robot, about the size of a medium Tupperware container — and in fact, the body is an upside-down Tupperware container. A gravity-fed ink brush hangs off the back, low enough to trail a line along whatever surface the bot is driving over. Two infrared sensors on the front detect obstacles in its path and steer it around them.
People play with BARB by placing objects in its path, lifting it, redirecting it. The bot reacts to its environment, the environment reacts to the people, and the drawing falls out as a record of all of that negotiation.
One thread
All three of these are the same project at different scales: build a tool that has its own opinions, hand it to a person, and see what comes out of the collaboration. That instinct — building tools that put people in productive conversation with machines — is still what I'm doing now, just with bigger machines.